微分的四层理解
一 微分是无穷小?
物理人喜欢把微分看做是一个很小的量,这在计算时总是很方便的,但是给人一种不严谨的感觉。
实际上,它确实不严谨,第二次数学危机就是因此产生的。
严谨性与易懂性永远是互补的。把微分看做无穷小,迎合感性的胃口,却无法通过理性的审查。
二 微分是线性函数
我喜欢把微分看做一个机器,例如
$f:f(x,y)=x^2+2y^2$
在 $(1,1)$ 处的微分
它就是这样一个机器:
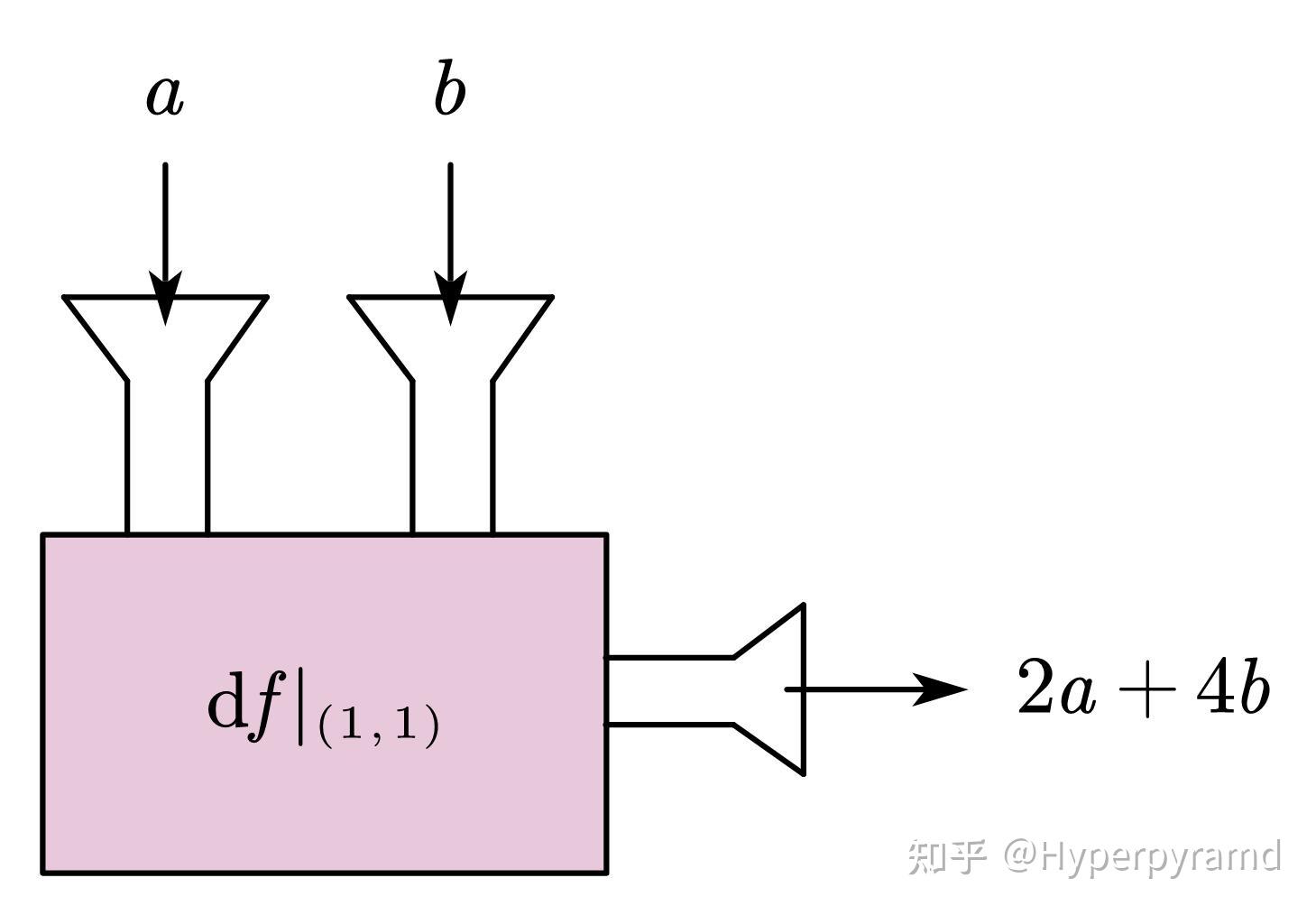
它接受两个数,吐出一个数。
写出来就是这样:
$\mathrm{d}f|_{(1,1)}(a,b)=\frac{\partial f}{\partial x}\bigg|_{(1,1)}a+\frac{\partial f}{\partial y}\bigg|_{(1,1)}b=2a+4b$
由于每一点的偏导可能不同,所以如果说某一点的微分是一个机器,那么,微分就是机器构成的海洋。
你可能还注意到了这个机器是“线性的”,它不过就是 $\mathbb{R}^2$ 到 $\mathbb{R}$ 的线性映射。
线性代数的知识告诉我们,线性函数的集合可以构成线性空间。换言之,线性函数自己就是个“矢量”,是可以加减数乘的。
回到上面的比喻,就是说,我们可以把两个机器加起来: $\mathrm{d}f|_p+\mathrm{d}g|_p$ ,
也可以将一个机器变为原来的 $\lambda$ 倍大: $\lambda \cdot \mathrm{d}f|_p $ 。
下标 p 表示在 p 点的微分。
把机器加起来是什么意思呢?举个例子,若
$\mathrm{d}f|_p(a,b)=2a+4b,,, \mathrm{d}g|_p(a,b)=a-b$ ,
则 $\mathrm{d}f|_p(a,b)+\mathrm{d}g|_p(a,b)=3a+3b$ 。
这很像是两个矢量的相加: $(2,4)+(1,-1)=(3,3)$ 。
实际上,它们就是矢量。是的,你没听错,微分是矢量(场)。
三 微分是对偶矢量场
3.1 切空间
如果你想要在一个弯曲的面上研究微分,那么你就需要重新定义一些概念。比如,微分是线性的,可是流形是弯曲的,所以我们需要在这弯曲中定义一个线性的东西出来。这个线性的东西就是切空间。
顾名思义,切空间就是一个曲面在某一个点处的切面。但是要怎么定义它呢?这里的弯曲并不是嵌在另一个空间里的弯曲,而是空间本身的弯曲,这种弯曲是内禀的。我们不能像古典解析几何那样去求切面方程。
我们换一个思路:
首先,它是线性的,也就是说它是一个向量空间。
向量空间就是一个配备了数乘的阿贝尔群。具体地说,它里面的元素(称为矢量)满足如下性质:
(1)矢量的加法交换律
(2)矢量的加法结合律
(3)矢量的加法有单位元(类似于零)
(4)矢量的加法有逆元(类似于相反数)
以上四个性质表明线性空间对于矢量加法而言是一个阿贝尔群。
(5)数乘有乘法单位元
(6)数乘的乘法结合律
(7)数乘的乘法分配律(对标量分配)
(8)数乘的乘法分配律(对矢量分配)
向量空间不必是 $\mathbb{R}^n,,\mathbb{C}^n$,只要一个集合里定义了加法和数乘运算且满足以上性质,这个集合就是一个向量空间。
我们可以定义这样一个向量空间,它其中的元素是光滑函数的集合到实数域的线性映射:
$v:\mathcal{F}_M\rightarrow\mathbb{R}$ 满足
(1)$v(\lambda f+\mu g)=\lambda v(f)+\mu v(g)$ (线性律)
(2) $v|_p(f\cdot g)=f|_p\cdot v(g)+g|_p\cdot v(f)$ (莱布尼茨律)
其中 $\mathcal{F}_M$ 是微分流形 $M$ 上所有光滑函数构成的集合。
可以证明, $v$ 的集合可以构成向量空间。
别看这个定义这么复杂,实际上就是对一个函数在某一点求方向导数。
以二元函数为例,我们显式地写出 $v$ 的一个实例: $\left(a\frac{\partial}{\partial x}+b\frac{\partial}{\partial y}\right)\bigg|_p$
如果以 $(\frac{\partial}{\partial x}\bigg|_p,\frac{\partial}{\partial y}\bigg|_p)$ 为基,那么它的坐标就是 $(a,b)$ 。
这个线性空间就是流形 $M$ 上点 $p$ 处的切空间,记作 $T_pM$ 。
以上所有操作都是在某一点 $p$ 的,每一点都长出了一个切空间。你可以想象成弯曲面上的每一点都长出了一个切平面。
3.2 余切空间
刚才介绍了切空间 $T_p M$ 。我们现在把切空间的对偶空间 $T_p^*M$ 叫做余切空间。
某一点的微分正是余切空间中的元素。换言之,某一点的微分是一个余切矢量。
对偶空间中的元素(余切矢量)是线性泛函,能把原空间中的元素映射成一个数。这正是我们之前所说的机器:
只不过现在的输入应该是切空间中的元素 $\left(a\frac{\partial}{\partial x}+b\frac{\partial}{\partial y}\right)\bigg|_p$ 。
我们说过,微分是机器的海洋。因此余切矢量的海洋(也就是微分)可以叫做余切矢量场。
在数学中,微分(余切矢量场)有一个酷炫的名字,叫做余切丛的截影。详见
https://zhuanlan.zhihu.com/p/629852598
说了这么多抽象废话,下面来定义一下:
流形 $M$ 上某一点 $p$ 处的微分是这样一个线性泛函,它作用到切空间的元素 $v|_p\in T_pM$ 上,得到 $\mathrm{d}f|_p(v|_p)=v|_p(f)$
再举一个更显式的例子,以二元函数为例:
$\mathrm{d}f|_{p}:\mathrm{d}f|_{p}(v|_p)=v|_p(f)= \frac{\partial f}{\partial x} \bigg|_{p} a+\frac{\partial f}{\partial y}\bigg|_{p}b$ ,其中 $v|_p=\left(a\frac{\partial}{\partial x}+b\frac{\partial}{\partial y}\right)\bigg|_p$
四 微分是 Jacobian 矩阵刻画的线性映射
到目前为止,我们讨论的都是到达域为 $\mathbb{R},\mathbb{C}, \cdots$ 的函数。如果到达域可以是 $\mathbb{R}^2, \mathbb{R}^3,\cdots$ 呢?
例如 $\bm{f}:\mathbb{R}^n\rightarrow\mathbb{R}^m$ 。
此时,可以把 $\bm{f}$ 看成 m 个函数:
$f_i:\mathbb{R}^n\rightarrow\mathbb{R},,,i=1,\cdots,m$
那么就有
$\begin{bmatrix}\mathrm{d}f_1 \\ \mathrm{d}f_2 \\ \vdots \\ \mathrm{d}f_m \end{bmatrix}= \begin{bmatrix} \frac{\partial f_1}{\partial x_1}&\frac{\partial f_1}{\partial x_2}&\cdots&\frac{\partial f_1}{\partial x_n} \\ \frac{\partial f_2}{\partial x_1}&\frac{\partial f_2}{\partial x_2}&\cdots&\frac{\partial f_2}{\partial x_n} \\ \vdots&\vdots&\ddots&\vdots \\ \frac{\partial f_m}{\partial x_1}&\frac{\partial f_m}{\partial x_2}&\cdots&\frac{\partial f_m}{\partial x_n} \end{bmatrix}\begin{bmatrix}\mathrm{d}x_1 \\ \mathrm{d}x_2 \\ \vdots \\ \mathrm{d}x_n \end{bmatrix}$
其中 $\begin{bmatrix} \frac{\partial f_1}{\partial x_1}&\frac{\partial f_1}{\partial x_2}&\cdots&\frac{\partial f_1}{\partial x_n} \\ \frac{\partial f_2}{\partial x_1}&\frac{\partial f_2}{\partial x_2}&\cdots&\frac{\partial f_2}{\partial x_n} \\ \vdots&\vdots&\ddots&\vdots \\ \frac{\partial f_m}{\partial x_1}&\frac{\partial f_m}{\partial x_2}&\cdots&\frac{\partial f_m}{\partial x_n} \end{bmatrix}$ 就是 Jacobian 矩阵。
实际上,微分就是 Jacobian 矩阵所表示的线性映射。下面我们来详细解释一下。
对于一元函数,Jacobian 矩阵就是导数。
虽然我们习惯把导数看做斜率,但是我们现在不妨换个看法:如果你把一元函数的作用看作是数轴的拉伸,那么导数就是局部的伸缩比率。这样的好处是容易推广到多元函数。
因为,对于多元函数,你通常很难像一元函数那样做出一条曲线来表示函数。所以,作为一种替代方法,你可以把多元函数看做是空间的拉伸,例如 f: R^2→R^2。你可以想象 R^2 的每一点都被 f 拉到了新的一点。
如果你放大这个拉伸的局部,它看起来也像一元函数的情形那样,是线性的——平行等距的线被拉伸成平行等距的线。
而我们所说的微分,正是这个局部的线性映射!这个线性映射的矩阵就是 Jacobian 矩阵。
Khan Academy 的 Multivariable Calculus 课程的第 71-72 集有更详细的解释:
https://www.youtube.com/watch?v=bohL918kXQk
如果显示网络错误,你也可以看 b 站的搬运:
https://www.bilibili.com/video/BV1NJ411r7ja?from=search&seid=11489752606099978202